
Efficient photogrammetry missions maximize the acreage covered per mission. Multi-copter range determines photogrammetry acreage coverage. This analysis demonstrates that flight speed has a great influence on multi-copter range. Flight time alone does not determine multi-copter range.
Multi-copter advertisements typically list flight time performance while hovering – and not hovering. Hovering is always shorter. Flight speed must reduce current load. The relationship between flight speed and current is likely U-shaped.
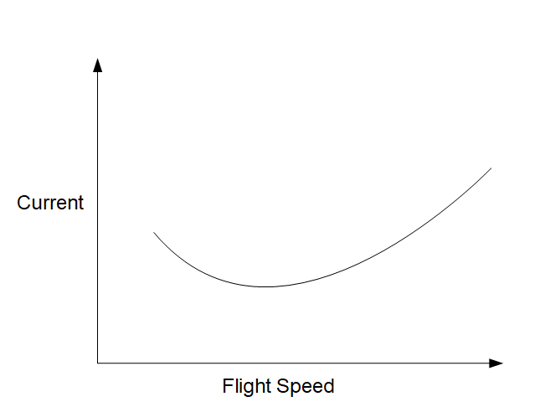
This shape is similar to the aerodynamic lift versus drag curves for fixed wing aircraft. Maximum endurance (flight time) for fixed wing aircraft is achieved at the airspeed resulting in the lowest point of the lift versus drag curve – or L/D-Max.
On the multi-copter current versus flight speed curve, maximum endurance (flight time) would be where current is lowest. However this may not achieve the maximum multi-copter range.
Prevailing winds affect fixed wing range. To maximize range, fixed wing pilots use a rule of thumb: Add 25% of the headwind component to the airspeed in a headwind, and subtract 25% of the tailwind component. I would anticipate multi-copters to behave differently – as fixed wing and multi-copter aerodynamics are different.
Without the aid of multi-copter aerodynamic theory, I conducted a simple flight test to establish the general relationship between multi-copter flight speed and range. It demonstrated that for typical photogrammetry flight speeds, flying faster increases range.
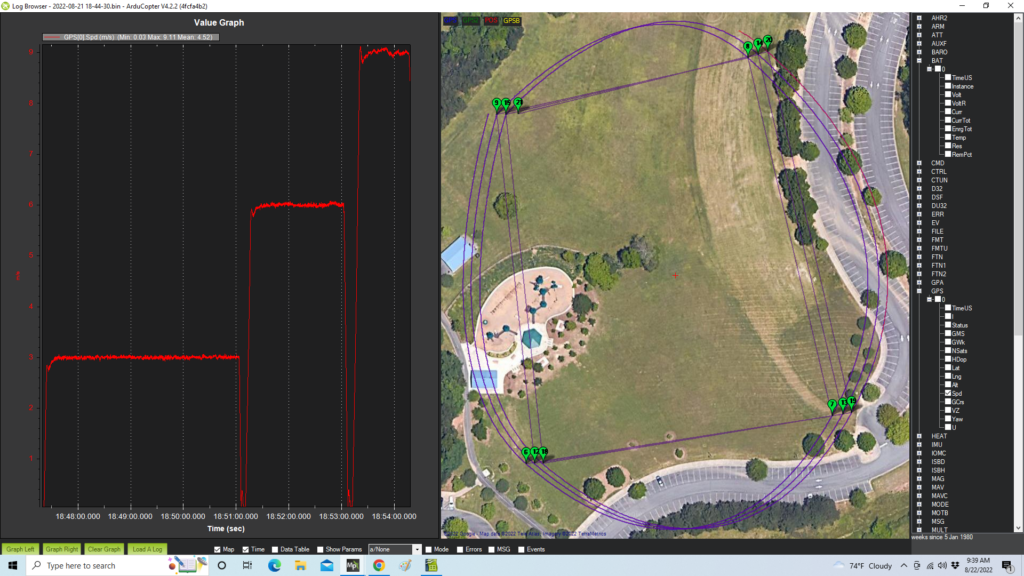
Aerodynamic forces acting on a multi-copter depend on airspeed. Unfortunately, multi-copters don’t generally have airspeed sensors – and missions are planned on speed as detected by GPS. Following a circular flight path, variations in airspeed given the constant GPS speed is averaged out.
I flew a mission of three circular flight paths. Each circuit was at a different GPS speed: 3 m/s, 6 m/s and 9 m/s.
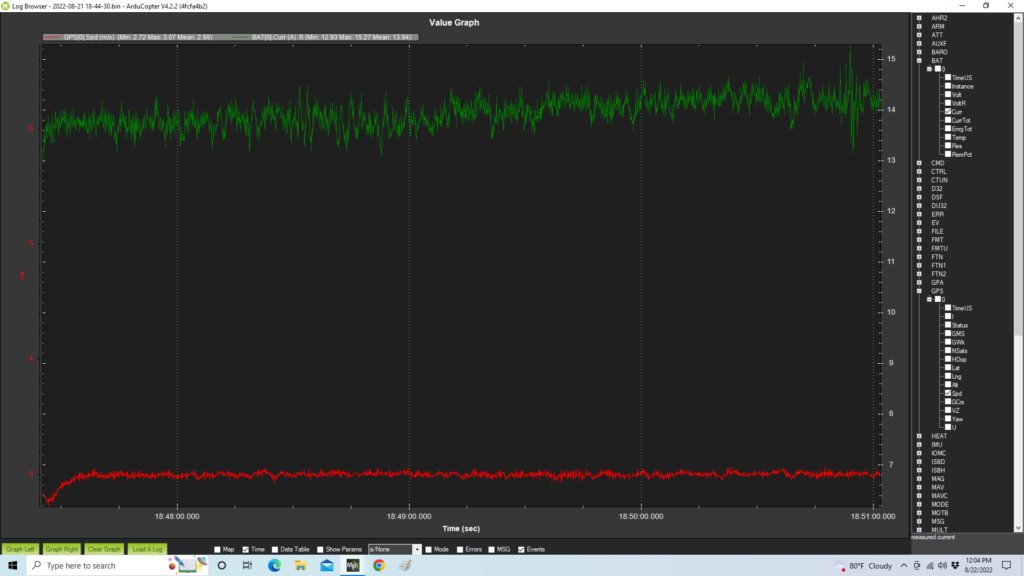
The flight log for the 3 meter per second orbit indicates average amperage of 13.94.
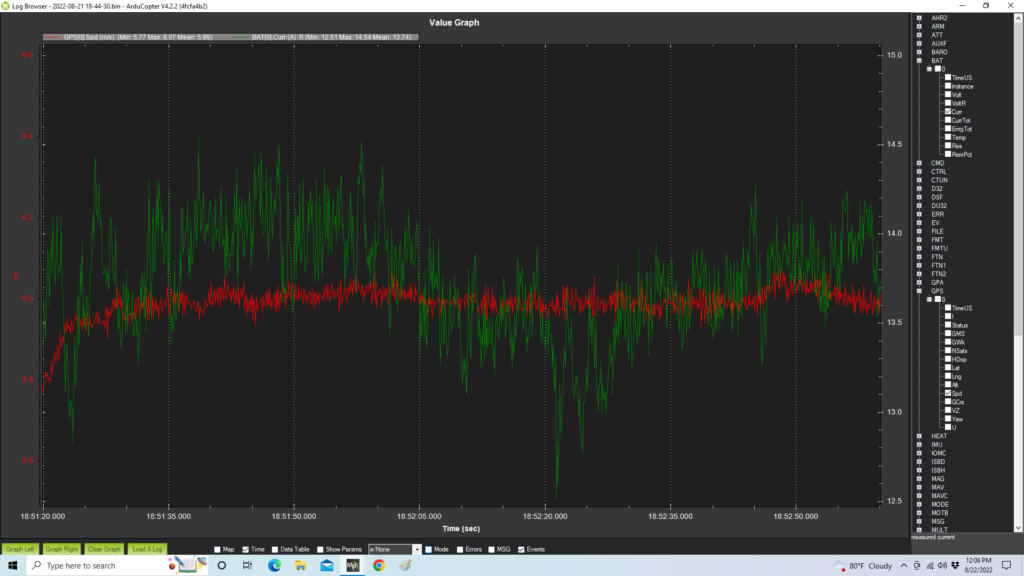
The flight log for the 6 meter per second orbit indicates average amperage of 13.74.
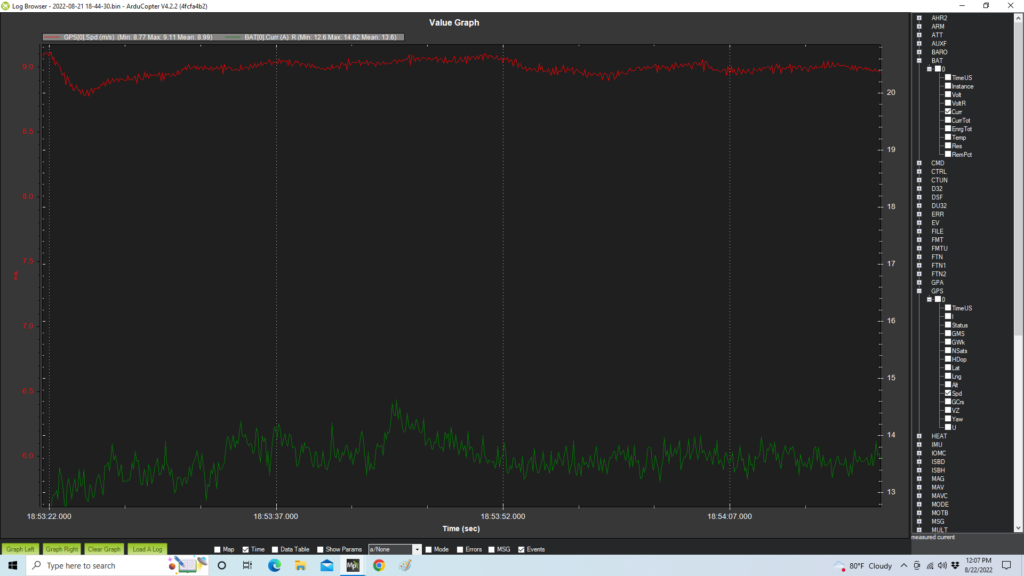
And the flight log for the 12 meter per second orbit indicates average amperage of 13.6.
My test multi-copter uses a 5200 mAh battery, and my failsafe uses a 1000 mAh reserve. With the numbers from these test flights, I calculated the flight distance until reaching the 4200 mAh failsafe for each speed:

For these three samples, flying faster slightly reduces battery load but greatly increases flight distance. In fact, in this range, flight distance increases roughly proportionally with speed. No doubt at some speed, battery load would increase and range would fall off.
Photogrammetry missions have constraints imposed by camera sensor, shutter speed and lens. Maximizing photogrammetry mission efficiency requires determining the longest possible range respecting the photographic constraints.
These photographic constraints are examined in another technical article.