
- Overview
- Connectivity and Installation
- Usage Examples
- Issues and Opportunities
Usage Examples
I constructed an auto mission to test the A8’s overall performance. I flew this mission at several speeds and never found the wind to cause the gimbal to lose stability. On one high speed sharp turn the gimbal did “fall over” – but eventually recovered on it’s own.
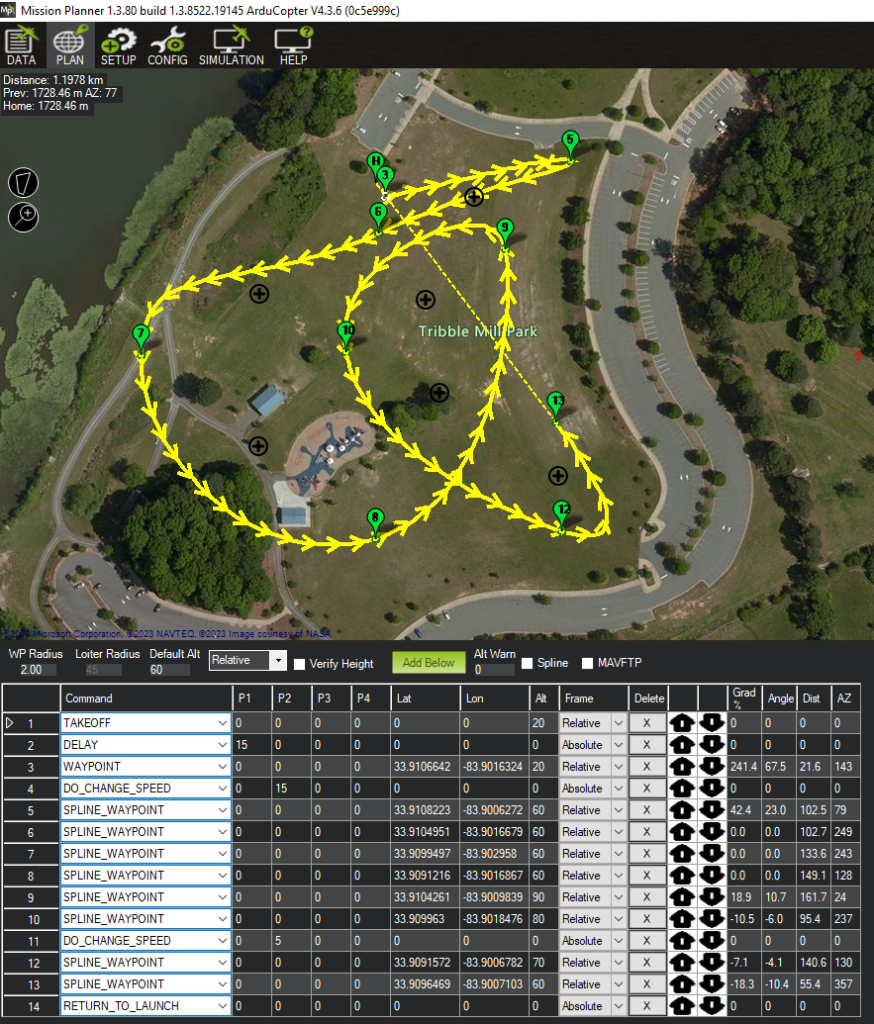
The recorded 4K video was satisfactory for casual usage. Considering the low cost of the A8, the results were excellent. With no vibration damping other than the four rubber balls on the A8’s mount, the video was almost totally free of “jello” artifacts. The “follow” function in yaw is somewhat slow – especially on sharp turns. And the auto white balance didn’t always adjust properly. But the image is clear and smooth – and I believe is an excellent value.
To test the A8’s response to MavLink gimbal control, I planned an auto mission with several ROI points. ArduPilot issued the appropriate pitch commands to keep the ROI in the camera’s view. The copter yawed to keep the appropriate azimuth to keep the ROI in view, but gimbal yaw delay from the slow follow function occasionally kept the ROI properly in view.
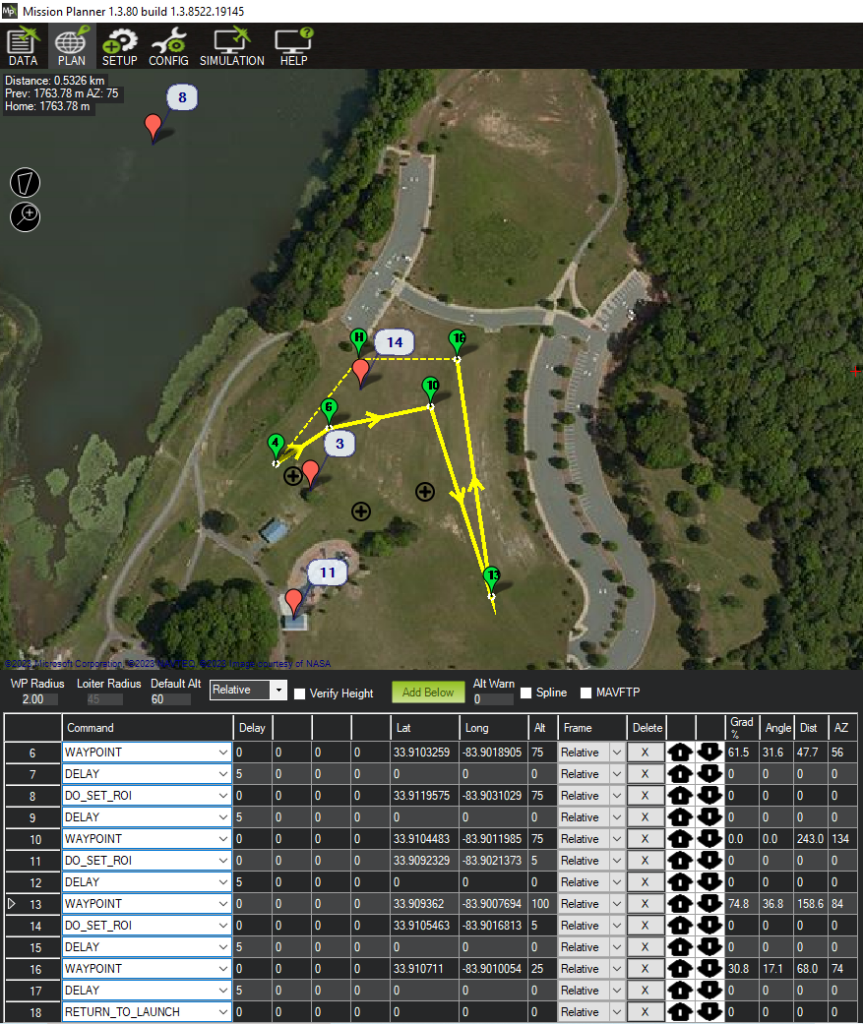
The most significant problem I observed however, was the gimbal’s yaw 90 degrees to the left on the landing phase of the RTL. I’ve been unable to determine the cause of this problem.
The marketing of the SIYI A8 says it has a “Starlight” camera for recording in night time settings. I did a short test in my yard at night. Since this is under a canopy of trees, very little is captured. However when a passing car comes into view, the night time scene is recorded well.
Although the SIYI A8’s 8MP camera makes it of limited use for photo mapping applications, I did fly a photo mapping mission with it to test the gimbal and camera’s response to the autopilot’s MavLink commands for gimbal control and shutter trigger.
Planning the mission required determining the A8’s sensor parameters. (Focal length and height & width in mm and pixels.)


Unfortunately, for some reason only 86 images were captured on the A8’s SD card. I was able to determine that they were the last 86 contiguous images by processing them in Pix4D.
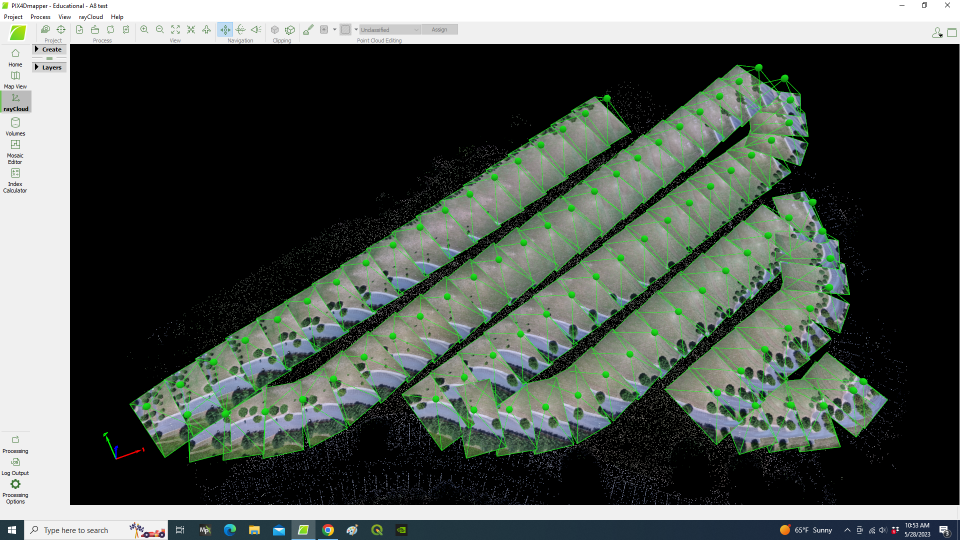
Even though the A8’s 8MP camera could only produce a GSD of about 2.5cm at a flight altitude of 60 meters, I though might be possible to make fairly good 3D models – especially on missions at a lower flight altitude.

The orthomosaic seems acceptable – especially given it’s large GSD. Flying at a lower altitude would dramatically improve this.
There was one major issue with this test. For some reason the EXIF on the A8’s image files would not accept the Mission Planner’s geotags. Fortunately, the Mission Planner geotag utility also produces the same data in a .CSV file, which Pix4D could apply to the image files when loading them.